Аннотация
Настоящая статья является третьей публикацией цикла о цифровых двойниках и логически продолжает две предыдущие работы: о вычислительной базе CFD / вычислительной гидрогазодинамики и о месте цифровых двойников в современной инженерии [1, 2]. Цель настоящей статьи — не вывести физико-математические уравнения, а структурировать процесс проектирования цифрового двойника сложного изделия, показать иерархию моделей, определить место моделей разной физической полноты и объяснить, как организуется декомпозиция сверху вниз и интеграция снизу вверх.
В качестве примера рассмотрена система амортизации шасси коммерческого самолета. Декомпозиция в статье задана в следующем виде: цифровой двойник самолета → цифровой двойник системы шасси → цифровой двойник шасси (одной стойки) → цифровые двойники составных частей / групп элементов → цифровые двойники деталей. Отдельно показан обратный ход: от деталей к самолету, когда локальные характеристики деталей и узлов агрегируются в цифровой двойник стойки шасси, затем в цифровой двойник системы шасси и далее — в единый цифровой двойник самолета.
На этом основании предложены: общий алгоритм создания цифрового двойника изделия; структура цифрового двойника для рассматриваемого авиационного примера; критерии выбора объектов, подлежащих физико-математическому моделированию; алгоритм моделирования с обратными связями между расчетом, испытаниями и эксплуатацией; карта физических явлений и методов моделирования по уровням иерархии. Показано, что практически полезный цифровой двойник не является одной универсальной моделью. Он представляет собой согласованную систему моделей разной размерности и разной физической полноты: 0D/1D / системные модели, MBD / многотельная динамика, FEM / конечно-элементный анализ, CFD / вычислительная гидрогазодинамика, а также ROM / модели пониженного порядка и data-driven / модели на данных.

Схема 1 — Структура цифрового двойника коммерческого самолета. Основные подсистемы и модели цифрового двойника.
Особый акцент сделан на том, что для одной стойки шасси именно внутренние газогидравлические процессы в амортизаторе / гидротормозе являются приоритетным объектом высокоточного CFD / вычислительного гидрогазодинамического моделирования. Однако в настоящей, третьей, статье этот объект рассматривается только как следующий уровень детализации в общей иерархии. Четвертая статья цикла будет специально посвящена гидротормозу / амортизатору: его физико-математической постановке, численной схеме и результатам моделирования, полученным в ранее выполненных проектах.
Ключевые слова: цифровой двойник, самолет, система шасси, стойка шасси, декомпозиция, интеграция моделей, CFD / вычислительная гидрогазодинамика, MBD / многотельная динамика, FEM / конечно-элементный анализ, ROM / модель пониженного порядка, алгоритм моделирования, обратные связи.
1. Введение
Настоящая работа является третьей статьей цикла. Первая статья рассматривала вычислительную базу современных инженерных моделей — развитие CFD / вычислительной гидрогазодинамики, высокопроизводительных вычислений и инженерных подходов к турбулентности [1]. Вторая статья переводила обсуждение на более широкий инженерный уровень: эволюцию концепции цифрового двойника, уровни зрелости, физические процессы, методы моделирования и индустриальные эффекты [2]. Логический следующий шаг — показать не обзор отрасли, а структурную методологию создания цифрового двойника конкретного изделия и продемонстрировать ее на авиационном примере.
В материалах NIST / Национального института стандартов и технологий США цифровой двойник рассматривается как электронное представление физического объекта, обеспечивающее синхронизацию с реальной системой и прогнозную аналитику ее состояний [3, 4]. Стандарты семейства ISO 23247 / стандарты цифрового двойника для производства фиксируют архитектурную логику цифрового двойника, требования к информационному обмену и правила композиции цифровых двойников разного уровня [5, 6, 7, 8]. Для сложного изделия из этого следует принципиальный вывод: цифровой двойник нельзя строить как одну «большую» модель. Его необходимо проектировать как связанную систему двойников, согласованных по функциям, интерфейсам, данным и показателям качества.
Система амортизации шасси коммерческого самолета является показательным примером такого объекта. С одной стороны, она подчиняется общей динамике самолета при посадке, рулении, торможении и уборке / выпуске. С другой — внутри одной стойки протекают локальные нелинейные процессы, которые нельзя надежно описать только упрощенными зависимостями. Классические описания oleo-pneumatic shock strut / гидропневматической стойки показывают, что ее работа основана на совместном действии газовой пружины и гидравлического демпфирования через отверстия и metering pin / дозирующий стержень [9]. Для гидротормозных устройств сходного класса ранее была показана работоспособность трехмерной постановки на базе Navier–Stokes / уравнений Навье–Стокса, VOF / метода объемных долей [11] и движущихся деформируемых сеток [10].
Цель настоящей статьи — показать, как структурно создается цифровой двойник и как организуется его моделирование, если декомпозиция выполняется по цепочке: самолет → система шасси (группа шасси) → одна стойка шасси → составные части / группы элементов → детали, а затем выполняется обратная интеграция снизу вверх. Таким образом, текущая статья закрывает именно методологический уровень — от верхнеуровневой архитектуры до правил детализации, не подменяя собой последующую предметную статью по гидротормозу. В настоящей работе основное внимание уделено архитектуре, иерархии, критериям выбора объектов моделирования и распределению методов по уровням. Гидротормоз / амортизатор как объект детального CFD / вычислительного гидрогазодинамического моделирования вынесен в следующую, четвертую, статью.
2. Общий алгоритм создания цифрового двойника изделия
Общий алгоритм состоит из двух взаимосвязанных частей:
- постановка задачи и декомпозиция сверху вниз;
- сборка и согласование моделей снизу вверх.
Такой подход позволяет одновременно решить две задачи: не потерять системную цель на верхнем уровне и не упростить чрезмерно локальную физику на нижнем уровне.
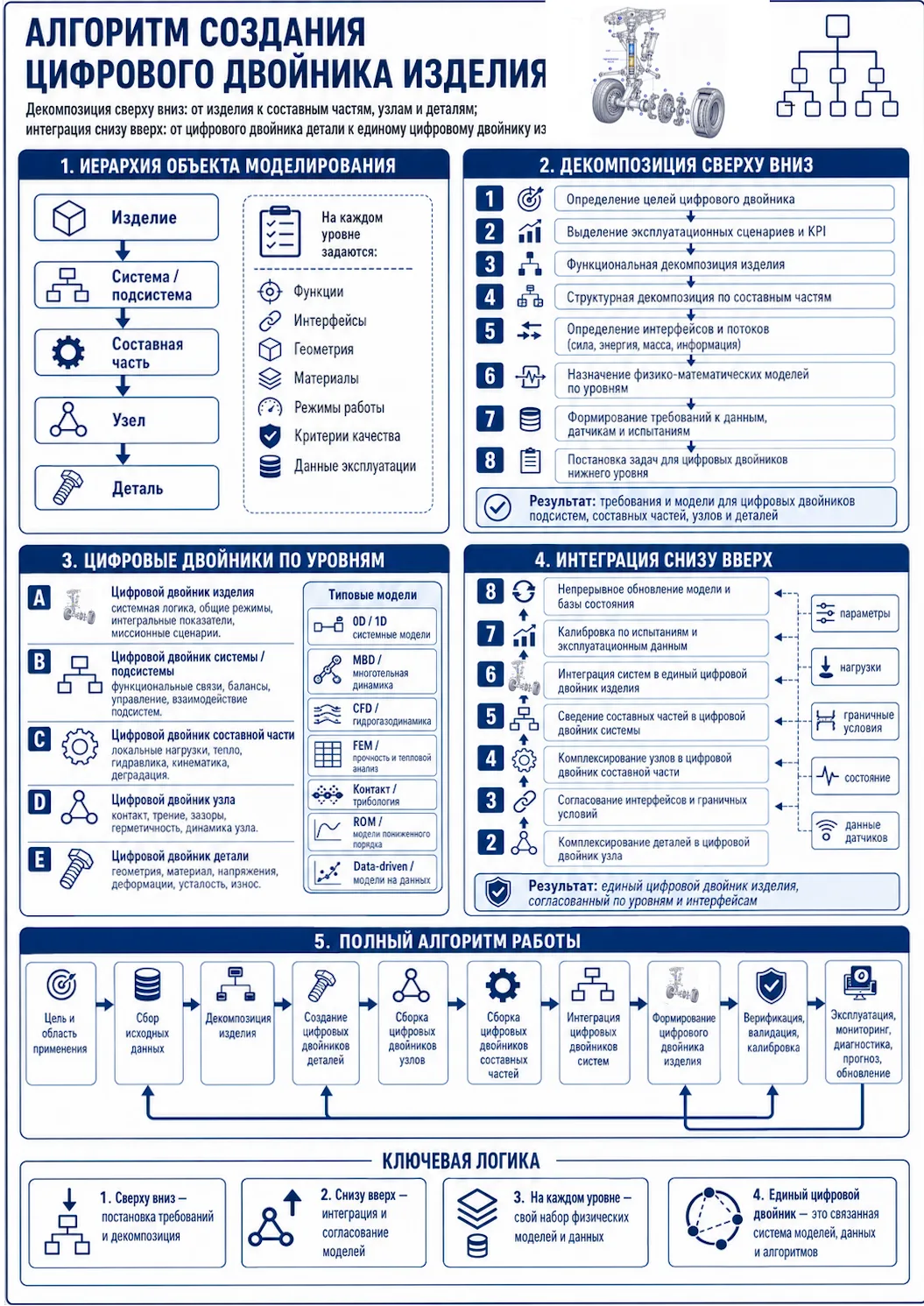
Схема 2 — Общий алгоритм создания цифрового двойника изделия с декомпозицией сверху вниз и интеграцией снизу вверх. В качестве иллюстративного объекта использована система амортизации шасси.
В инженерной постановке общий алгоритм удобно записывать как последовательность шагов.
Шаг 1. Определение цели цифрового двойника. Формулируется назначение: проектирование, доводка, сертификационная поддержка, мониторинг состояния, диагностика, прогноз ресурса или смешанный сценарий. На этом же шаге задаются KPI / ключевые показатели верхнего уровня.
Шаг 2. Выделение эксплуатационных сценариев. Определяются режимы, в которых цифровой двойник должен быть практически полезен: полет, посадка, руление, торможение, уборка / выпуск, режимы обслуживания и особые случаи.
Шаг 3. Функциональная декомпозиция изделия. Выделяются функции изделия и функции его подсистем: восприятие нагрузки, передача энергии, демпфирование, удержание герметичности, управление, контроль, диагностика.
Шаг 4. Структурная декомпозиция. Объект раскладывается на уровни: изделие, система, составная часть, узел, деталь. Для каждого уровня задаются границы, интерфейсы и набор доступных данных.
Шаг 5. Выделение интерфейсов и потоков. Описываются потоки силы, энергии, массы и информации, по которым далее будут связываться цифровые двойники разных уровней.
Шаг 6. Назначение классов моделей по уровням. Принимается решение, где достаточно 0D/1D / системной модели, где требуется MBD / многотельная динамика, где нужен FEM / конечно-элементный анализ, а где без CFD / вычислительной гидрогазодинамики получить достоверную локальную физику невозможно.
Шаг 7. Формирование требований к данным и испытаниям. Планируются стендовые и эксплуатационные данные, необходимые для калибровки и валидации: давление, перемещение, скорость, температура, усилия, ускорения, вибрации, утечки, история циклов.
Шаг 8. Создание цифровых двойников нижнего уровня. Строятся локальные модели узлов и деталей, поведение которых чувствительно к геометрии, материалу, контакту, проточной части или деградации.
Шаг 9. Интеграция снизу вверх. Локальные модели преобразуются в согласованные интерфейсные зависимости: коэффициенты расхода, характеристики силы, тепловые сопротивления, законы трения, карты режимов, редуцированные зависимости для быстрого двойника.
Шаг 10. Эксплуатация и обновление. Данные реального объекта используются для оценки текущего состояния, коррекции параметров, обнаружения аномалий и запуска уточняющих расчетов. Благодаря этому цифровой двойник после ввода в эксплуатацию не «завершается», а продолжает развиваться.
Таким образом, общий алгоритм всегда включает два хода одновременно: сверху вниз задаются цели, структура и требования, а снизу вверх собираются физические модели, интерфейсные зависимости и данные состояния.
3. Иерархическая декомпозиция: от самолета к детали и обратно
Для настоящей статьи декомпозиция должна быть задана не в абстрактном виде «изделие — система — узел — деталь», а в форме, непосредственно связанной с авиационным объектом. В этой работе используется следующая иерархия:
- цифровой двойник самолета;
- цифровой двойник системы шасси;
- цифровой двойник шасси (одной стойки: передней, левой основной, правой основной и т.д.);
- цифровые двойники составных частей / групп элементов;
- цифровые двойники деталей.
Обратная интеграция строится в обратном порядке:
детали → группы элементов / составные части → шасси → система шасси → самолет.
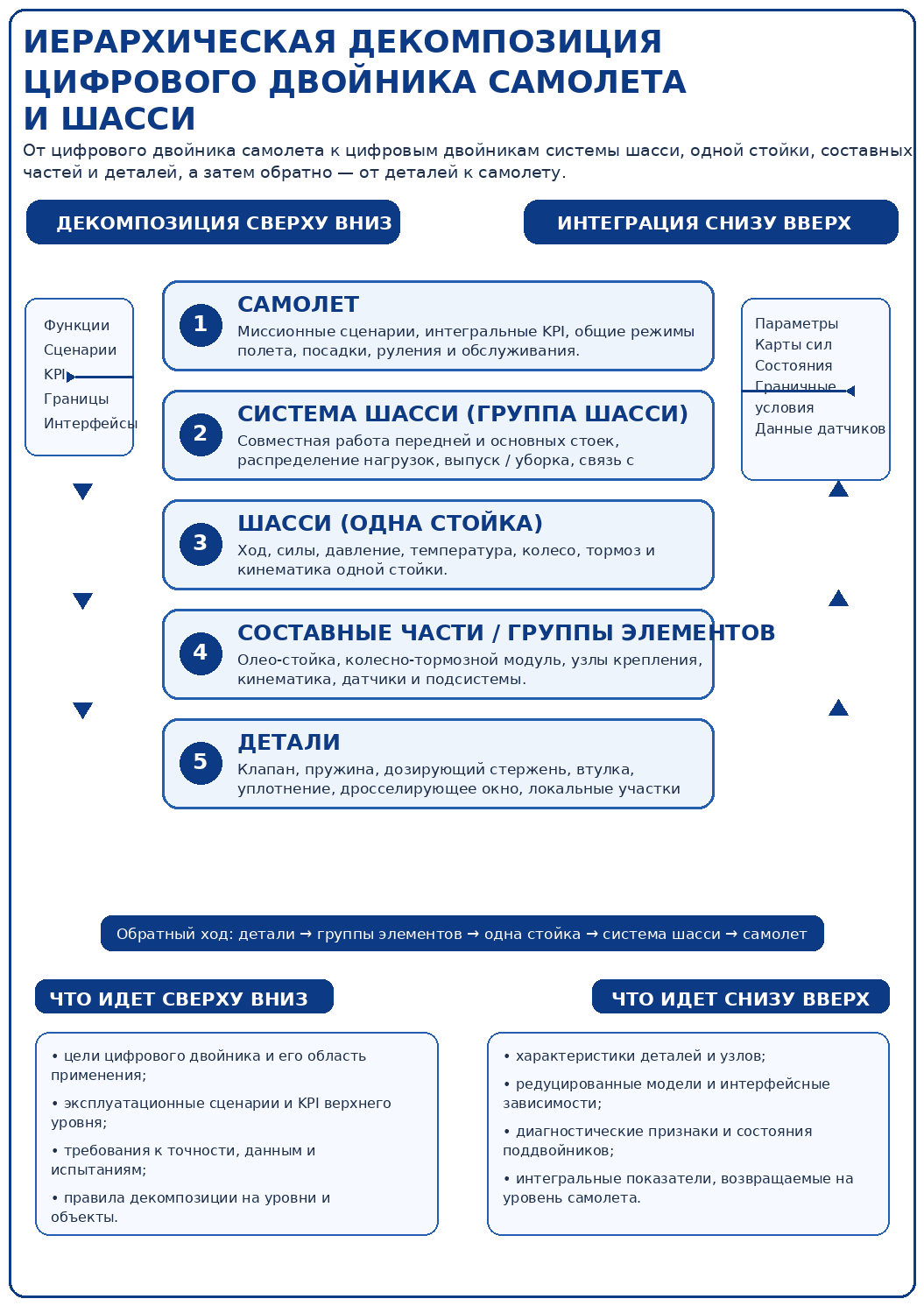
Схема 3 — Иерархическая декомпозиция цифрового двойника: от самолета к системе шасси, одной стойке, составным частям и деталям, а затем обратно — к самолету.
Эта схема означает, что на каждом уровне цифровой двойник отвечает на свой круг вопросов, а на верхний уровень передаются уже согласованные и агрегированные характеристики нижележащих уровней. Практически это можно представить в виде таблицы 1.
Таблица 1 — Уровни иерархии цифрового двойника и их роль
| Уровень | Основной объект | Главный вопрос уровня | Доминирующие методы |
|---|---|---|---|
| Самолет | Самолет как целое | Как объект работает в миссионных сценариях и какие интегральные KPI он показывает | 0D/1D, MBD, модели на данных |
| Система шасси | Группа шасси самолета | Как совместно работают передняя и основные стойки, как распределяются нагрузки | MBD, системные модели, логика управления |
| Одна стойка шасси | Конкретная стойка шасси | Как одна стойка формирует силовой, кинематический и тепловой отклик | 0D/1D, MBD, FEM, локально CFD |
| Составные части / группы элементов | Стойка, колесно-тормозной модуль, узлы крепления, датчики | Какая локальная физика определяет поведение данного модуля | 1D/3D гидравлика, FEM, контакт, трибология, локально CFD |
| Детали | Клапан, пружина, втулка, уплотнение, дозирующий стержень и др. | Как геометрия, материал и состояние детали влияют на свойства узла | FEM, локальный контакт, локальная CFD, модели деградации |
3.1. Цифровой двойник самолета
На верхнем уровне располагается цифровой двойник самолета. Здесь решаются задачи миссионного уровня: посадочные сценарии, допустимые режимы, интегральные перегрузки, распределение энергии при касании, влияние состояния шасси на безопасность и эксплуатационные ограничения. Этот уровень должен работать с KPI / ключевыми показателями и с режимами, а не с локальной геометрией клапана или дросселирующего окна.
Именно поэтому на уровень самолета снизу поднимаются не поля давления и скорости, а агрегированные характеристики: силовые и ходовые характеристики стоек, диапазоны допустимых температур, остаточный ресурс, диагностические признаки и ограничения режимов.
3.2. Цифровой двойник системы шасси
Следующий уровень — цифровой двойник системы шасси (группы шасси), то есть цифровой двойник всех шасси самолета как функционально связанной системы. Здесь рассматривается совместная работа передней и основных стоек, распределение нагрузок между опорами, связь с механизмами уборки / выпуска, взаимодействие с тормозной системой, а также влияние асимметрии, состояния шин, различий по зарядке стоек и по деградации.
Именно на этом уровне появляется задача согласования нескольких стоек в одной модели: одна стойка уже не рассматривается изолированно, а входит в систему, которая должна воспроизводить поведение самолета при касании, пробеге, рулении и торможении.
3.3. Цифровой двойник шасси (одной стойки)
Третий уровень — цифровой двойник шасси (одной стойки). Это ключевой уровень перехода от системного описания к локальной физике. Здесь стойка рассматривается как самостоятельный объект, имеющий собственные переменные состояния: ход, скорость, силы, давление газа и жидкости, температуру, состояние уплотнений, колесо, тормоз, кинематику и передаваемую нагрузку.
Именно здесь связываются между собой несколько классов моделей: 0D/1D / системная газогидравлика стойки, MBD / многотельная динамика кинематики и нагрузки, FEM / конечно-элементные оценки прочности и жесткости, а для приоритетных внутренних процессов — CFD / вычислительная гидрогазодинамика. Поэтому цифровой двойник одной стойки является центральным связующим уровнем между системой шасси и локальными моделями ее составных частей.
3.4. Цифровые двойники составных частей / групп элементов
Ниже уровня одной стойки находятся цифровые двойники составных частей / групп элементов. В рассматриваемом примере к ним относятся:
- стойка как газогидравлический модуль;
- колесно-тормозной модуль;
- узлы крепления и передачи нагрузки;
- кинематические элементы уборки / выпуска и ограничения поворота;
- датчики и информационные элементы, если они участвуют в диагностике и обновлении модели.
На этом уровне объект уже достаточно локален, чтобы учитывать геометрию проточной части, локальные контакты, упругие деформации, тепловыделение и деградацию, но еще достаточно велик, чтобы описывать завершенную физическую функцию. Именно сюда естественным образом относится амортизатор / гидротормоз как составная часть одной стойки. В настоящей статье он только фиксируется в структуре цифрового двойника; его самостоятельное подробное рассмотрение вынесено в статью 4.
3.5. Цифровые двойники деталей
Самый нижний уровень — цифровые двойники деталей. До этого уровня следует опускаться только там, где это действительно меняет свойства вышестоящего объекта. Для рассматриваемой темы это прежде всего:
- клапан и его упругие элементы;
- дозирующий стержень / metering pin / дозирующий стержень;
- кромка дросселирующего окна;
- губа уплотнения;
- направляющая втулка;
- локальный участок стенки цилиндра, если важны износ, нагрев или усталость;
- детали тормозного пакета и контактных сопряжений, если они заметно влияют на ресурс и тепловой режим.
Следовательно, не каждая деталь должна иметь собственный цифровой двойник. Детализация задается не конструкторской спецификацией как таковой, а влиянием детали на свойства узла и на KPI верхнего уровня.
3.6. Обратная интеграция: от деталей к самолету
Обратная интеграция строится как последовательная агрегация результатов нижнего уровня.
- От деталей к составным частям / группам элементов. На этом шаге свойства деталей превращаются в характеристики узлов: коэффициенты расхода, законы трения, утечки, локальные тепловые сопротивления, допустимые напряжения, признаки износа.
- От составных частей к одной стойке. Характеристики составных частей объединяются в цифровой двойник одной стойки: формируются зависимость силы от хода и скорости, реакция на температуру, зарядка газовой камеры, реакция на деградацию и диагностические признаки.
- От одной стойки к системе шасси. Параметры стоек связываются в цифровой двойник группы шасси: появляется согласование между передней и основными стойками, распределение нагрузки между опорами и влияние асимметрии.
- От системы шасси к самолету. На верхнем уровне формируются миссионные показатели: безопасность посадки, эксплуатационные ограничения, требования к обслуживанию, запас ресурса и обновление эксплуатационных правил.
Именно этот обратный ход и делает цифровой двойник единым: на уровень самолета поднимаются не «сырые» локальные поля, а проверенные, агрегированные и интерфейсно согласованные характеристики нижележащих уровней.
4. Пример: структура цифрового двойника системы шасси коммерческого самолета
4.1. Граница рассматриваемого цифрового двойника
В настоящей статье объектом примера является система амортизации шасси коммерческого самолета. При этом разбор выполняется так, чтобы связь с верхними уровнями — цифровым двойником самолета и цифровым двойником системы шасси — не терялась, а декомпозиция одной стойки была встроена в общую архитектуру изделия. В ее границу включаются: стойка, газовая камера, гидравлическая часть, поршневой узел, клапанная система, узлы крепления, ножничные тяги / боковой подкос, колесо, шина, тормозной узел, а также измерительная и информационная подсистема.
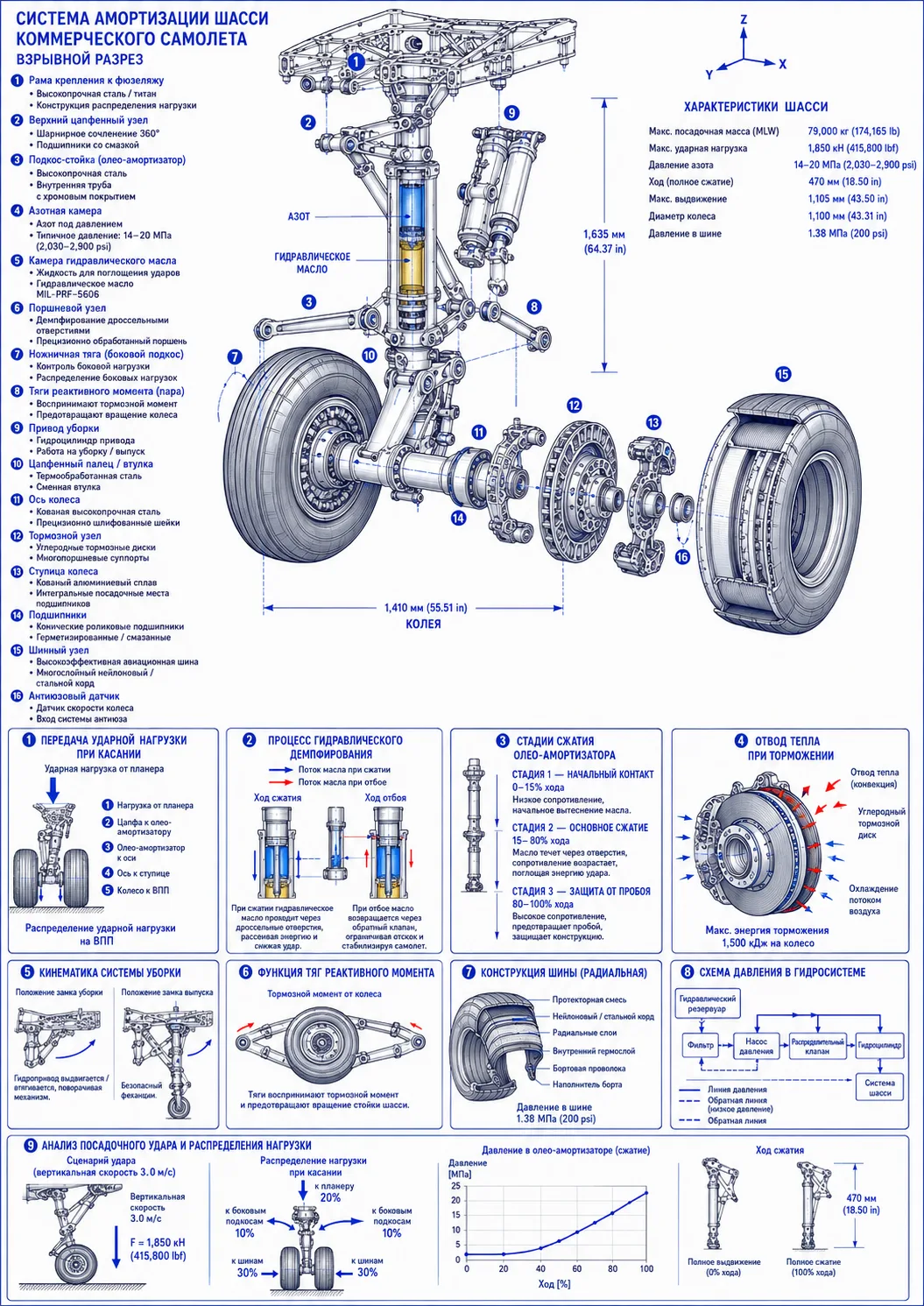
Схема 4 — Система амортизации шасси коммерческого самолета: состав узлов, кинематика, стадии сжатия, торможение и распределение нагрузок.
С инженерной точки зрения этот объект объединяет несколько разных классов физики:
- динамику посадки и связь с планером;
- газовую пружину и гидравлическое демпфирование в стойке;
- контакт колеса с ВПП / взлетно-посадочной полосой и торможение;
- прочность и ресурс телескопической части и элементов крепления;
- трение, износ и утечки в уплотнениях и направляющих;
- контрольно-измерительную функцию через датчики хода, давления, температуры и ускорений.
Следовательно, цифровой двойник шасси по определению должен быть многослойным. Попытка свести его к одной модели немедленно приводит либо к чрезмерной упрощенности, либо к вычислительной неработоспособности.
4.2. Декомпозиция одной стойки шасси до составных частей и деталей
Если перейти от уровня шасси к уровню одной стойки, то декомпозиция приобретает конкретный инженерный вид.
На уровне одной стойки выделяются следующие составные части / группы элементов:
- стойка как основной амортизирующий модуль;
- колесно-тормозной модуль;
- узлы крепления и передачи нагрузки;
- кинематические элементы и ограничители поворота;
- датчики и информационные элементы.
Для самой стойки как составной части, в свою очередь, выделяются группы элементов, определяющие ее физику:
- газовая камера;
- гидравлическая камера;
- поршневой узел;
- клапанная система;
- уплотнения и направляющие;
- телескопическая силовая часть.
Наконец, на уровне деталей появляются конкретные элементы, свойства которых могут заметно менять характеристики стойки:
- клапанный диск / золотник;
- пружина клапана;
- дозирующий стержень;
- кромка дросселирующего окна;
- губа уплотнения;
- направляющая втулка;
- локальный участок стенки цилиндра в зоне износа или нагрева.
Именно такая декомпозиция и соответствует логике настоящей статьи: сначала задается место стойки в системе шасси и в самолете, затем сама стойка раскладывается на функциональные составные части, и только после этого — на детали, действительно влияющие на свойства узлов. Это важно методологически: цифровой двойник детали вводится не как формальный аналог конструкторской спецификации, а как инструмент объяснения и прогноза тех локальных эффектов, которые затем агрегируются на уровень узла, стойки, системы шасси и самолета.
4.3. Что должно оставаться на каждом уровне
С практической точки зрения важно не только разделить объект, но и правильно распределить содержание моделей по уровням.
- На уровне самолета остаются сценарии, интегральные ограничения, миссионные показатели, логика эксплуатации и верхнеуровневые решения.
- На уровне системы шасси остаются распределение нагрузок между опорами, логика совместной работы стоек, выпуск / уборка и взаимодействие с планером.
- На уровне одной стойки остаются ее силовая, кинематическая, газогидравлическая и тепловая характеристики как единого объекта.
- На уровне составных частей остаются локальные физические функции: демпфирование, контакт, торможение, герметичность, направляющее действие, передача нагрузки.
- На уровне деталей остаются геометрическая чувствительность, материал, остаточные напряжения, износ, локальная утечка, локальный тепловой режим и деградация.
Такое распределение и обеспечивает методологическую чистоту: верхний уровень не перегружается локальной геометрией, а нижний не теряет связи с системными KPI.
5. Критерии выбора объектов, подлежащих физико-математическому моделированию
После декомпозиции возникает главный инженерный вопрос: какие объекты необходимо моделировать физико-математически, а какие можно оставить на уровне параметрических, эмпирических или data-driven / моделей на данных?
Предлагается использовать следующий набор критериев отбора. Объект должен попадать в приоритетную область математического моделирования, если выполняется несколько из следующих условий.
- Объект влияет на KPI верхнего уровня. Например, он заметно меняет перегрузку при посадке, максимальный ход стойки, пиковое давление, температуру, тормозной момент или ресурс.
- В объекте присутствует сильная нелинейность. Это может быть зависимость силы от хода, переход от прилипания к скольжению, резкое изменение расхода через клапан, нелинейная работа контакта, зависимость утечки от зазора.
- В объекте присутствует мультифизика. Например, совместное действие механики, гидравлики, газа, тепла, контакта и деградации.
- Поведение объекта чувствительно к локальной геометрии. Если изменение формы канала, зазора, окна, профиля детали или поверхности контакта заметно меняет отклик, упрощенная модель быстро перестает быть надежной.
- Объект плохо наблюдаем напрямую. Если датчиков недостаточно или они косвенные, физическая модель становится основным инструментом восстановления состояния.
- Объект деградирует и влияет на ресурс. Это относится к износу, утечкам, потере газозарядки, старению рабочей жидкости, росту трения и локальному перегреву.
- Результат модели можно редуцировать для верхнего уровня. Если детальную модель можно свернуть в карты режимов, коэффициенты, поверхности отклика или ROM / модель пониженного порядка, ее создание особенно оправдано.
- Экономический и эксплуатационный эффект превышает стоимость моделирования. Высокоточный уровень должен назначаться тем объектам, для которых модель реально снижает объем доводочных испытаний, облегчает диагностику или уменьшает риск отказа.
Соответствие критериев и инженерного решения удобно представить в таблице 2.
Таблица 2 — Критерии выбора объектов для детального математического моделирования
| Критерий | Вопрос к объекту | Следствие для уровня модели |
|---|---|---|
| Вклад в KPI | Меняет ли объект перегрузку, ход, давление, температуру, ресурс | Чем выше вклад, тем выше приоритет физической модели |
| Нелинейность | Есть ли сильная нелинейность силы, расхода, трения, тепла | Нелинейный объект плохо описывается постоянными коэффициентами |
| Чувствительность к геометрии | Меняет ли реальная форма канала, зазора, контакта отклик | Требуется геометрически чувствительная модель |
| Мультифизика | Связаны ли механика, гидравлика, газ, тепло, контакт, износ | Нужна комбинированная постановка или сопряжение моделей |
| Наблюдаемость | Есть ли прямые датчики и достаточная информативность данных | При плохой наблюдаемости возрастает роль модели |
| Деградация | Есть ли значимый износ, утечки, старение, потеря давления | Нужен связанный физико-диагностический двойник |
| Возможность редукции | Можно ли результат превратить в карту, коэффициент или ROM | Детальная модель особенно полезна для верхних уровней |
| Экономический эффект | Снижает ли модель стоимость испытаний и эксплуатации | При высоком эффекте оправдан высокоточный уровень |
Для рассматриваемой темы это приводит к следующему практическому результату.
- На уровне самолета обычно не строится детальная CFD-модель всего объекта; здесь преобладают системные и динамические модели.
- На уровне системы шасси приоритетными становятся модели распределения нагрузок, кинематики и управления.
- На уровне одной стойки появляется необходимость более детально описывать газогидравлические, тепловые и контактные процессы.
- На уровне составных частей в приоритетный контур обычно попадают амортизатор / гидротормоз, колесно-тормозной модуль, узлы уплотнений и направляющих.
- На уровне деталей моделируются только те элементы, которые действительно меняют свойства составной части: клапан, пружина, дозирующий стержень, уплотнение, втулка, дросселирующее окно, контактные и изнашиваемые поверхности.
Следовательно, амортизатор / гидротормоз попадает в область первоочередного детального моделирования не потому, что он «интересен сам по себе», а потому, что он удовлетворяет почти всем перечисленным критериям сразу: влияет на KPI, нелинеен, мультифизичен, чувствителен к геометрии и деградации и при этом позволяет построить редуцированные зависимости для вышестоящих уровней. Именно поэтому он будет вынесен в отдельную, четвертую, статью.
6. Какие физические явления подлежат моделированию и какими методами
Для системы амортизации шасси необходимо моделировать не один «процесс амортизации», а совокупность связанных явлений. Их удобно рассматривать одновременно по уровням иерархии и по физическим классам.
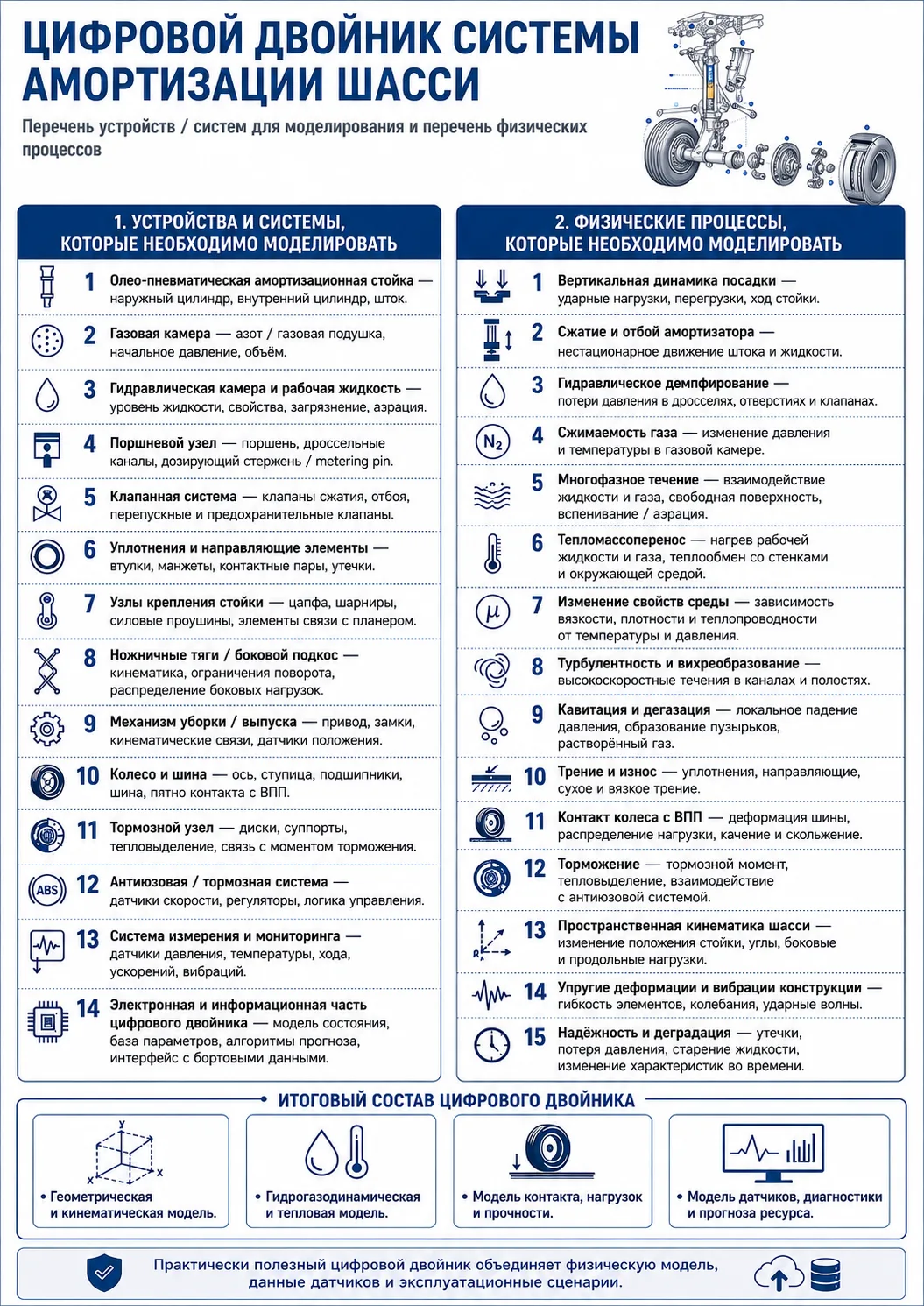
Схема 5 — Устройства, подсистемы и физические процессы, которые должны быть охвачены цифровым двойником системы амортизации шасси.
Схема 5 методологически продолжает иерархическую схему 3. Левая колонка фиксирует состав устройств и подсистем, которые должны быть представлены в цифровом двойнике одной стойки и связанных с ней модулей. Правая колонка показывает физические процессы, которые должны быть воспроизведены расчетными моделями. Верхняя разнесенная инженерная иллюстрация стойки подчеркивает связь между структурной декомпозицией объекта и картой физических явлений: сначала выделяются элементы конструкции, затем для каждого из них определяется требуемый класс моделей и уровень детализации.
6.1. Уровень самолета и системы шасси
На верхних уровнях ключевыми являются:
- вертикальная динамика посадки;
- перераспределение нагрузок между опорами;
- руление, пробег и торможение;
- кинематика уборки / выпуска;
- влияние состояния шасси на интегральные эксплуатационные ограничения.
Для этих явлений основными методами служат 0D/1D / системные модели, MBD / многотельная динамика, модели управления и логика принятия решений. Эти уровни отвечают на вопросы «что происходит с самолетом и с шасси в целом?».
6.2. Уровень одной стойки
На уровне одной стойки моделируются:
- ход стойки и силовая характеристика;
- сжатие газа в газовой камере;
- движение рабочей жидкости и перепад давления в стойке;
- тепловой режим и изменение свойств рабочей среды;
- связь стойки с колесом, тормозом и узлами крепления.
Здесь одновременно применяются 0D/1D / термогидравлические модели, MBD / многотельная динамика, локальные прочностные модели и — для наиболее чувствительных внутренних процессов — CFD / вычислительная гидрогазодинамика.
6.3. Уровень составных частей / групп элементов
На этом уровне появляются локальные явления:
- расход через отверстия, каналы и клапаны;
- трение и износ в уплотнениях и направляющих;
- контакт и тепловыделение в тормозном узле;
- локальные упругие деформации и изменение зазоров;
- утечки, потеря давления, деградация характеристик.
Для этих явлений используются 1D-гидравлические модели, FEM / конечно-элементный анализ, контакт / трибология, тепловые модели и локальные CFD / вычислительные гидрогазодинамические постановки.
6.4. Уровень деталей
На уровне деталей определяющими становятся:
- геометрия проточной части и кромок;
- материал и его деградация;
- локальные напряжения и деформации;
- усталость, износ, герметичность;
- локальные контактные и тепловые эффекты.
Здесь доминируют FEM / конечно-элементные модели, локальные модели контакта и, если деталь формирует проточную часть, локальные CFD / вычислительные гидрогазодинамические задачи.
6.5. Методы моделирования по явлениям
Соответствие физических явлений и рекомендуемых методов приведено в таблице 3.
Таблица 3 — Физические явления и рекомендуемые методы моделирования
| Физическое явление | Уровень иерархии | Базовый метод | Когда нужен детальный уровень |
|---|---|---|---|
| Посадочная динамика, распределение нагрузок, пробег | Самолет, система шасси | MBD, 0D/1D | При сложной кинематике и асимметрии опор |
| Сжатие газа и работа газовой пружины | Одна стойка | 0D/1D-термодинамика | При быстром цикле и заметном теплообмене |
| Расход рабочей жидкости через проточную часть | Одна стойка, составные части | 1D-гидравлические модели | При сильной зависимости от геометрии и локальных потерь |
| Многофазное течение со свободным газовым объемом | Одна стойка, составные части | CFD, VOF / метод объемных долей | Когда есть свободный объем, аэрация и переменное заполнение |
| Высокорейнольдсовая турбулентность в дросселирующих проходах | Составные части | RANS / осреднение по Рейнольдсу | При необходимости оценки локальных напряжений и отрывов |
| Тепломассоперенос, нагрев среды и изменение вязкости | Одна стойка, составные части | Тепловые сети, CFD с уравнением энергии | При высоких скоростях и циклической нагрузке |
| Контакт колеса с ВПП / взлетно-посадочной полосой | Система шасси, одна стойка | MBD, модели шины, контакт | При задачах торможения, бокового увода, шимми |
| Нагрев и ресурс тормозного пакета | Составные части, детали | FEM, контакт, тепловой анализ | При оценке теплового ресурса и взаимодействия с антиюзом |
| Трение, износ, утечки | Составные части, детали | Трибология, контакт, эмпирические модели | При деградации, потере герметичности и росте трения |
| Прочность, усталость и вибрации | Одна стойка, составные части, детали | FEM, модальный и усталостный анализ | При сертификационных сценариях и расчете долговечности |
| Диагностика и прогноз остаточного ресурса | Все уровни | Идентификация параметров, фильтры состояния, модели на данных | На эксплуатационном уровне цифрового двойника |
Из этой карты следует принципиальный вывод: цифровой двойник системы шасси не должен состоять только из CFD. Его практическая ценность возникает именно из сочетания моделей разной размерности и разной физической полноты — от быстрых системных моделей до локальных высокоточных расчетов. Вместе с тем без CFD невозможно достоверно описать критические локальные процессы внутри одной стойки, если речь идет о газожидкостном демпфировании, сложной проточной геометрии и тепловой обратной связи. В качестве методической базы для турбулентных составляющих этих задач выступают SST-модель Ментера [13] и валидационная база NASA / AIAA TMR [12]; для двухфазных течений со свободной поверхностью и высоким отношением плотностей применимы слабосжимаемые формулировки с сохранением импульса [14].
7. Алгоритм моделирования с обратными связями
Наиболее продуктивной является не линейная, а замкнутая схема построения и применения цифрового двойника. Для рассматриваемой иерархии она может быть записана в следующем виде.
7.1. Основной цикл
Шаг 1. Формирование целей и сценариев. Определяются миссионные режимы самолета, сценарии работы системы шасси и целевые KPI / ключевые показатели.
Шаг 2. Декомпозиция сверху вниз. Цифровой двойник раскладывается по цепочке: самолет → система шасси → одна стойка → составные части / группы элементов → детали. Для каждого уровня фиксируются функции, границы, интерфейсы, потоки силы, энергии, массы и информации.
Шаг 3. Построение базовых моделей верхнего уровня. Создаются системные и динамические модели самолета, группы шасси и одной стойки. На этом уровне формируются интегральные законы движения, распределение нагрузок, верхнеуровневая логика эксплуатации и критерии допустимости.
Шаг 4. Ранжирование объектов по критичности. По критериям таблицы 2 выбираются составные части и детали, для которых требуется отдельное физико-математическое моделирование.
Шаг 5. Построение локальных моделей. Для приоритетных объектов создаются детальные CFD / вычислительные гидрогазодинамические, FEM / конечно-элементные, контактные и трибологические модели.
Шаг 6. Верификация, валидация и калибровка. Локальные и системные модели согласуются со стендовыми и эксплуатационными данными: давлением, ходом, температурой, ускорениями, нагрузками, утечками и историей циклов.
Шаг 7. Редукция порядка. Из детальных моделей строятся ROM / модели пониженного порядка, поверхности отклика, карты режимов и параметрические зависимости, пригодные для быстрого расчета на верхних уровнях.
Шаг 8. Интеграция снизу вверх. Характеристики деталей и составных частей собираются в цифровой двойник одной стойки, затем — в цифровой двойник системы шасси, после чего поднимаются на уровень самолета.
Шаг 9. Эксплуатационное обновление. По данным датчиков пересчитываются состояние, коэффициенты модели и индикаторы деградации.
Шаг 10. Перезапуск контура уточнения. Если невязка между измерениями и быстрым двойником превышает порог или объект выходит в непокрытый режим, автоматически инициируется уточняющий расчет на более высоком уровне fidelity / точности.
7.2. Обратные связи между уровнями
В такой схеме работают четыре принципиальные обратные связи.
Обратная связь 1: от верхнего уровня к нижнему. Цели, сценарии, допустимые режимы и KPI задаются сверху вниз и определяют, какие объекты вообще должны быть детализированы.
Обратная связь 2: от нижнего уровня к верхнему. Характеристики деталей и составных частей — коэффициенты расхода, законы трения, жесткости, тепловые сопротивления, признаки деградации — агрегируются и поднимаются в виде согласованных интерфейсных зависимостей.
Обратная связь 3: от данных к параметрам. Давление, температура, ход штока, ускорения, вибрации и история посадок используются для идентификации параметров быстрых моделей и оценки состояния объекта.
Обратная связь 4: от невязки к уровню детализации. Если быстрый двойник перестает воспроизводить эксперимент или эксплуатацию, активируется более детальная CFD / вычислительная гидрогазодинамика, FEM / конечно-элементная или контактная модель соответствующего уровня.
Таким образом, цифровой двойник является не просто набором расчетных файлов, а замкнутой системой моделей, данных и алгоритмов, в которой верхний уровень направляет детализацию, а нижний — поставляет уточненное физическое содержание.
8. Где в этой иерархии нужен CFD и почему гидротормоз/амортизатор вынесен в статью 4
С методологической точки зрения для рассматриваемой темы центральным является следующий тезис: в составе цифрового двойника самолета и системы шасси не все объекты требуют одинакового уровня CFD-детализации.
На уровне самолета и системы шасси преобладают системные, динамические и логические модели. На уровне одной стойки CFD начинает быть необходимым только для тех внутренних процессов, которые нельзя надежно свернуть в табличную характеристику. Именно к таким процессам относятся:
- движение рабочей жидкости через дросселирующие каналы и окна;
- взаимодействие жидкости и свободного газового объема;
- локальные перепады давления и пиковые нагрузки;
- тепловая обратная связь через изменение вязкости;
- чувствительность силовой характеристики к форме дозирующего стержня, зазоров и клапанов.
Следовательно, в иерархии статьи 3 амортизатор / гидротормоз занимает четко определенное место: это составная часть одной стойки, для которой должен быть построен отдельный высокоточный двойник на базе CFD / вычислительной гидрогазодинамики. Но сама физико-математическая постановка этого двойника здесь еще не развивается. Настоящая статья ограничивается двумя задачами:
- показывает, почему амортизатор необходимо выделять как отдельный объект моделирования;
- фиксирует, на каком уровне иерархии он должен быть встроен в общий цифровой двойник самолета и шасси.
Именно поэтому подробное рассмотрение гидротормоза / амортизатора — его физико-математической модели, численной схемы и результатов расчетов — логически вынесено в четвертую статью цикла. Такая последовательность методологически корректна: сначала определяется структура цифрового двойника и место каждого уровня, а затем детально исследуется наиболее чувствительный объект внутри этой структуры.
9. Практические выводы и место статьи в цикле
Из рассмотренной методики следуют несколько практических выводов.
Во-первых, цифровой двойник сложного изделия должен проектироваться от самолета к деталям, а не наоборот. Только в этом случае нижние уровни действительно подчинены верхнеуровневым сценариям и KPI, а не существуют изолированно.
Во-вторых, для авиационного примера полезная иерархия имеет конкретный вид: самолет → система шасси (группа шасси) → шасси (одна стойка) → составные части / группы элементов → детали. Такая запись лучше отражает инженерную реальность, чем абстрактная цепочка «изделие — система — узел — деталь».
В-третьих, обратный ход от деталей к самолету так же важен, как и декомпозиция сверху вниз. Без него локальные модели не становятся частью единого цифрового двойника, а остаются разрозненными расчетами.
В-четвертых, не все объекты требуют одинаковой глубины. Если объект не формирует собственной сложной физики, ему достаточно параметрического представления. Если же он определяет интегральный отклик системы и содержит сильную нелинейность, многофазность, температурную обратную связь или критичную деградацию, он должен иметь собственный физический поддвойник.
В-пятых, по отношению к циклу публикаций настоящая работа выполняет структурирующую функцию. Если первая статья раскрывала вычислительную и научно-технологическую базу современной CFD / вычислительной гидрогазодинамики [1], а вторая — общую инженерную картину цифровых двойников [2], то третья статья переводит разговор в плоскость проектной методологии: как именно декомпозировать изделие, как распределить физические модели по уровням и как организовать обратные связи между расчетом, испытаниями и эксплуатацией.
Заключение
Предложен структурный алгоритм создания цифрового двойника изделия, основанный на декомпозиции сверху вниз и интеграции снизу вверх. На примере системы амортизации шасси коммерческого самолета показано, что цифровой двойник должен строиться не как единичная модель, а как согласованная система цифровых двойников уровней:
цифровой двойник самолета → цифровой двойник системы шасси (группы шасси) → цифровой двойник шасси (одной стойки) → цифровые двойники составных частей / групп элементов → цифровые двойники деталей.
Показано также, что практическая ценность этой схемы определяется обратной интеграцией. Именно она превращает отдельные расчеты деталей и узлов в единый инженерный инструмент принятия решений на уровне системы шасси и самолета:
детали → составные части / группы элементов → одна стойка → система шасси → самолет.
Сформулированы критерии выбора объектов, подлежащих физико-математическому моделированию, и предложен алгоритм моделирования с обратными связями между расчетом, испытаниями и эксплуатацией. Показано, какие физические явления должны моделироваться на каждом уровне и какими классами методов это целесообразно делать.
Главный методологический результат статьи состоит в том, что амортизатор / гидротормоз не следует рассматривать как изолированный расчетный объект. Его необходимо включать в общую иерархию цифрового двойника самолета как высокоточный поддвойник составной части одной стойки. Именно это и подготавливает следующий шаг цикла: четвертую статью, в которой гидротормоз / амортизатор будет рассмотрен уже как самостоятельный объект физико-математического и численного моделирования. Тем самым статья 3 завершает этап структурирования и архитектурного проектирования цифрового двойника, а статья 4 перейдет к подробному анализу внутренней газогидродинамики амортизатора.
Список литературы
- Ефремов В. Р. Развитие математического моделирования и цифровых моделей. CFD-2030: что предвидело НАСА в 2014 году, как реализовано к 2026 и куда движется индустрия. Блог Valentin Efremov, 10 апреля 2026.
- Ефремов В. Р. Цифровые двойники в современной инженерии: от математической модели к экономическому эффекту. Блог Valentin Efremov, 8 мая 2026.
- NIST. Digital twins [Электронный ресурс]. National Institute of Standards and Technology, 2025–2026. nist.gov/digital-twins (дата обращения: 18.05.2026).
- NIST. Digital Twins: Essential Elements [Электронный ресурс]. National Institute of Standards and Technology, 2025. nist.gov/digital-twins/essential-elements (дата обращения: 18.05.2026).
- ISO 23247-1:2021. Automation systems and integration — Digital twin framework for manufacturing — Part 1: Overview and general principles. ISO, 2021.
- ISO 23247-2:2021. Automation systems and integration — Digital twin framework for manufacturing — Part 2: Reference architecture. ISO, 2021.
- ISO 23247-4:2021. Automation systems and integration — Digital twin framework for manufacturing — Part 4: Information exchange. ISO, 2021.
- ISO/FDIS 23247-6. Automation systems and integration — Digital twin framework for manufacturing — Part 6: Digital twin composition. Final Draft International Standard, approval phase, ISO, 2026.
- Currey N. S. Aircraft Landing Gear Design: Principles and Practices. AIAA Education Series. Washington, DC: AIAA, 1988.
- Efremov V., Kozelkov A., Dmitriev S., Kurkin A., Kurulin V., Utkin D. Technology of 3D Simulation of High-Speed Damping Processes in the Hydraulic Brake Device. In: Computational Models in Engineering. IntechOpen, 2018.
- Hirt C. W., Nichols B. D. Volume of Fluid (VOF) Method for the Dynamics of Free Boundaries. Journal of Computational Physics. 1981. Vol. 39. P. 201–225.
- AIAA Turbulence Model Benchmarking Working Group. Turbulence Modeling Resource (TMR). AIAA Fluid Dynamics TC / NASA Langley Research Center, 2026. turbmodels.larc.nasa.gov/…
- Menter F. R., Kuntz M., Langtry R. Ten Years of Industrial Experience with the SST Turbulence Model. In: Turbulence, Heat and Mass Transfer 4. Begell House, 2003. P. 625–632.
- Yang K., Aoki T. A Momentum-Conserving Weakly Compressible Navier–Stokes Solver for Simulation of Violent Two-Phase Flows with High Density Ratio. International Journal of Computational Fluid Dynamics. 2022. Vol. 36. No. 9. P. 776–796.